Worcester Polytecnhic Institute (WPI)
Teaching Assistant, WPI, U.S.A (01/11 - 05/12)
My primary function in WPI as a Teaching Assistant was to aid student projects involving pick and play robots. The main focus on the course was the ability to program the bot to pick and segregate based on weight. The controller board was primarily programmed using the Eclipse IDE with a focus on 'C' language. The controller board known as the RBE Development board consisted of an ATMEL Atmega644PA microprocessor. The hex code from the IDE to the uP was transferred through the Pollullu Programmer. I was recognized for performance with an Outstanding Teaching Assistant Award.
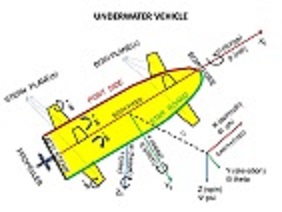
Capstone Project :Modeling and Control of an Autonomous Underwater Vehicle
A simulation framework for testing control algorithms on Autonomous Underwater Vehicle (AUV). The framework comprised of a path planning algorithem, trajectory generation, controler design and 3D Visualization tools. The effectiveness of the framework was measured using case studies. The AUV model is represented as a MATLAB function with the name of the AUV. The input parameters are the initial state vector and control input vector. Output parameters are a derivative of the state vector. The software allows the user to set as many waypoints as needed including the initial and final orientation of the AUV.
Click on the image below to view the final project